-
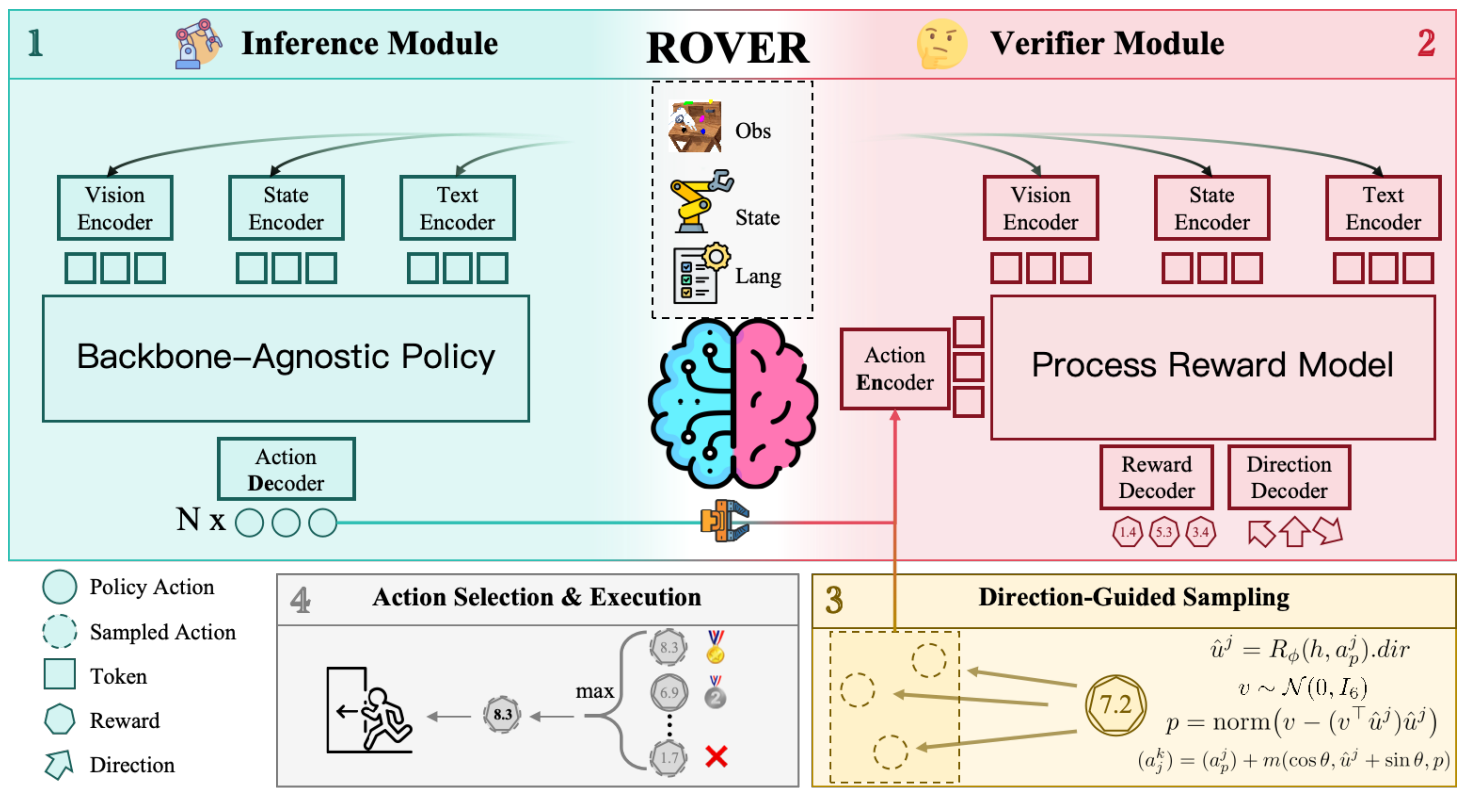
RoVer: Robot Reward Model as Test-Time Verifier for Vision-Language-Action Model
Mingtong Dai, Lingbo Liu*, Yongjie Bai, Yang Liu, Zhouxia Wang, Rui SU, Chunjie Chen, Liang Lin, Xinyu Wu
[PDF]
-
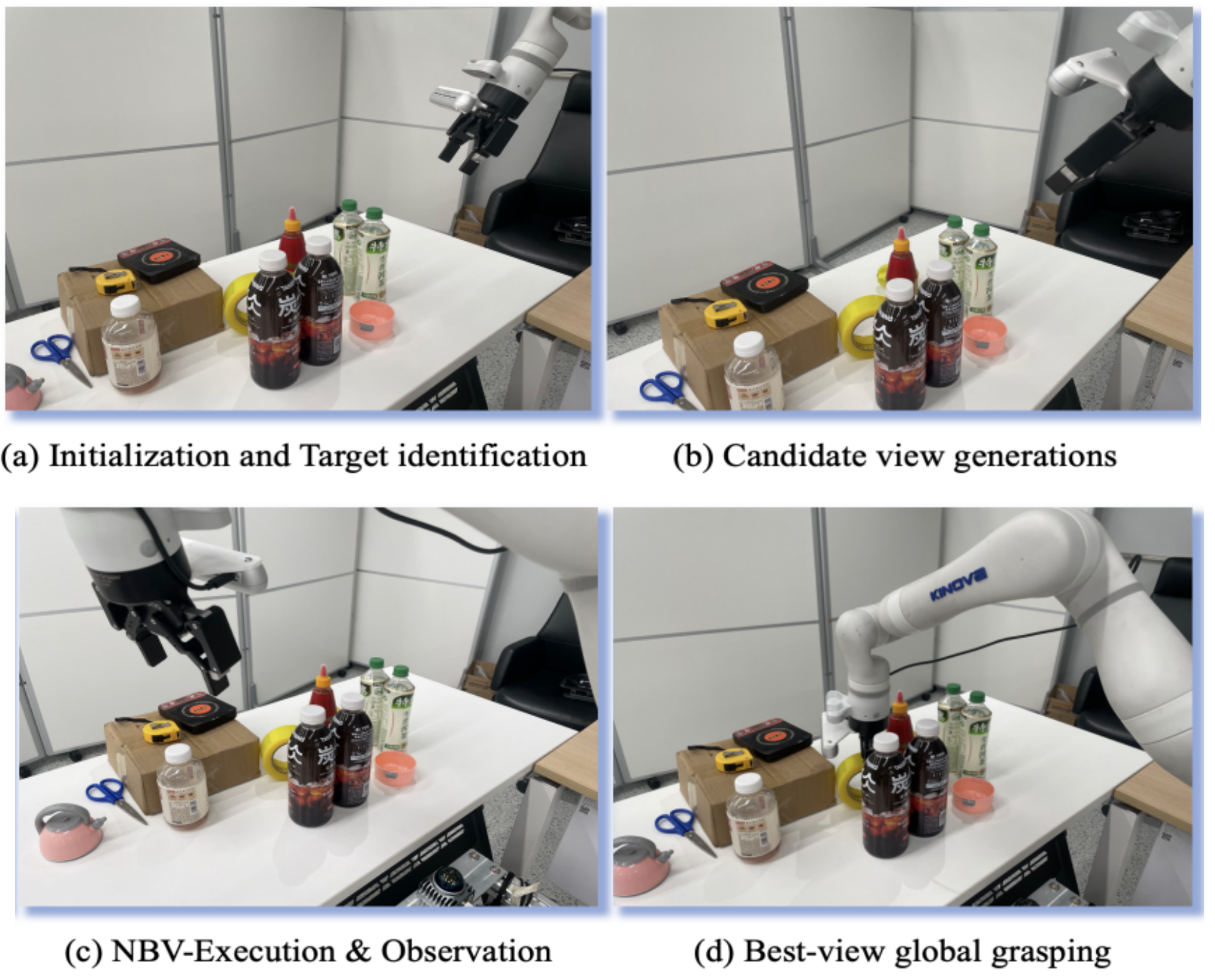
GraspView: Active Perception Scoring and Best-View Optimization for Robotic Grasping in Cluttered Environments
Shenglin Wang, Mingtong Dai, Jingxuan Su, Lingbo Liu*, Chunjie Chen, Xinyu Wu, Liang Lin
[PDF]
-
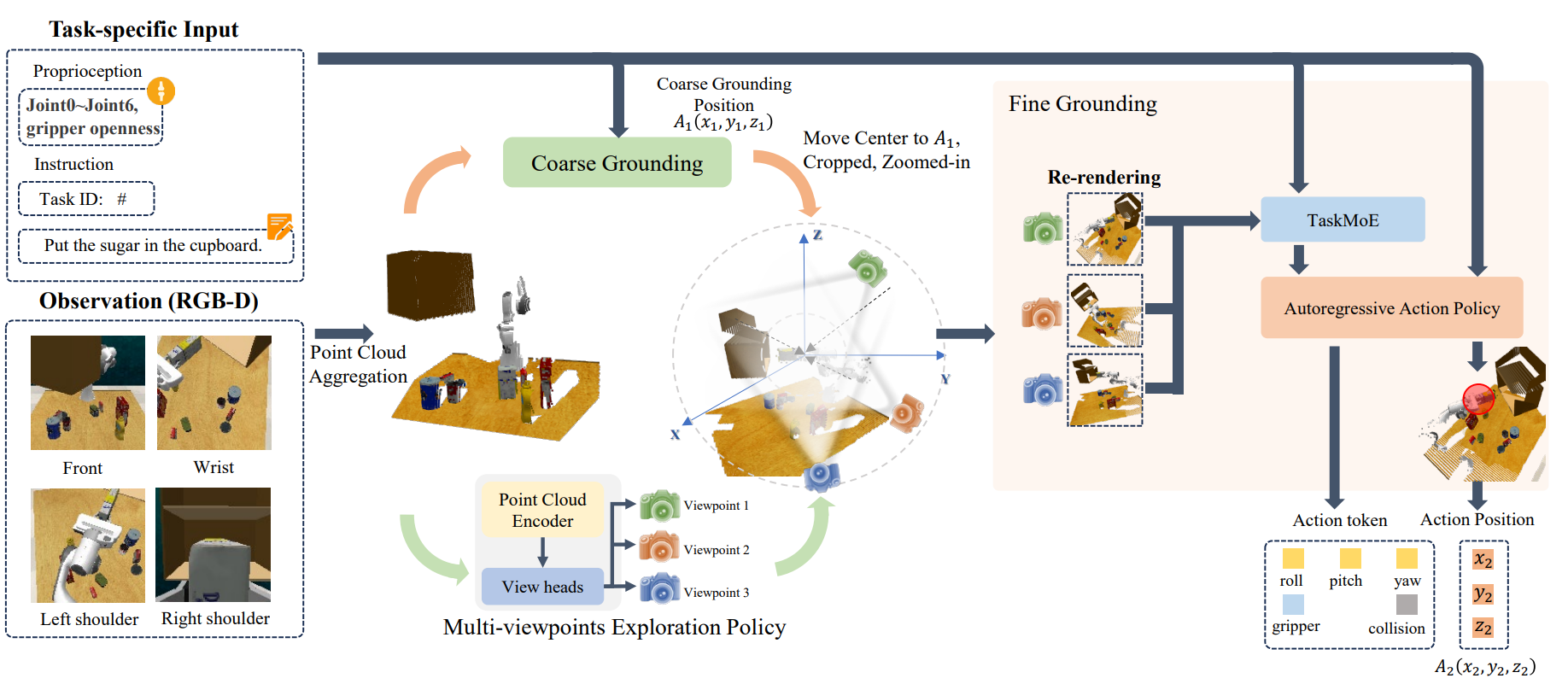
Learning to See and Act: Task-Aware View Planning for Robotic Manipulation
Yongjie Bai, Zhouxia Wang, Yang Liu, Weixing Chen, Ziliang Chen, Mingtong Dai
Yongsen Zheng, Lingbo Liu, Guanbin Li, Liang Lin
[PDF]
Works