-
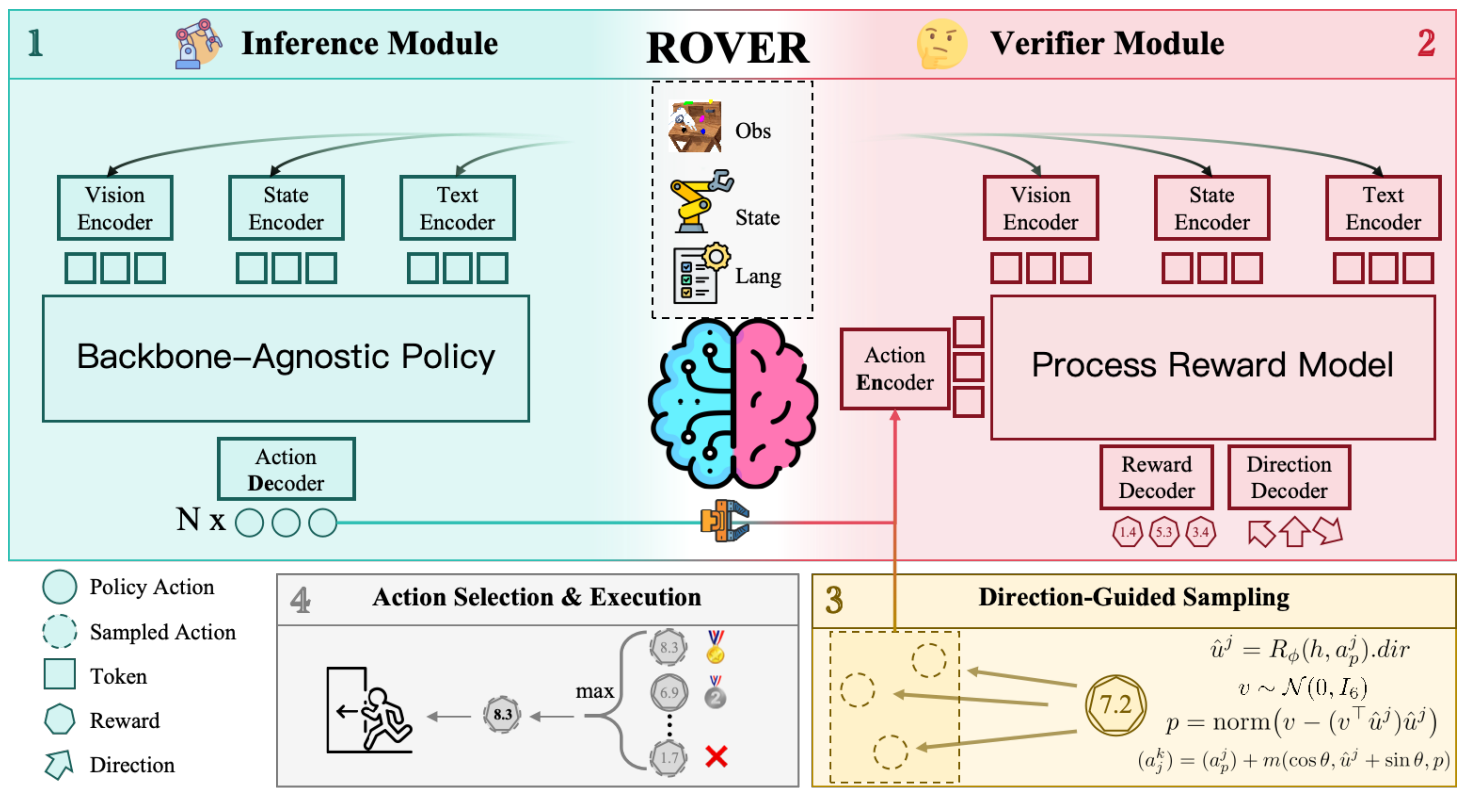
RoVer: Robot Reward Model as Test-Time Verifier for Vision-Language-Action Model
Mingtong Dai, Lingbo Liu*, Yongjie Bai, Yang Liu, Zhouxia Wang, Rui SU, Chunjie Chen, Liang Lin, Xinyu Wu
[PDF]
-

SkiP: When to Skip and When to Refine for Efficient Robot Manipulation
Mingtong Dai, Guanqi Peng, Yongjie Bai, chunjie chen, Lingbo Liu*, Liang Lin, Xinyu Wu
[PDF]
-
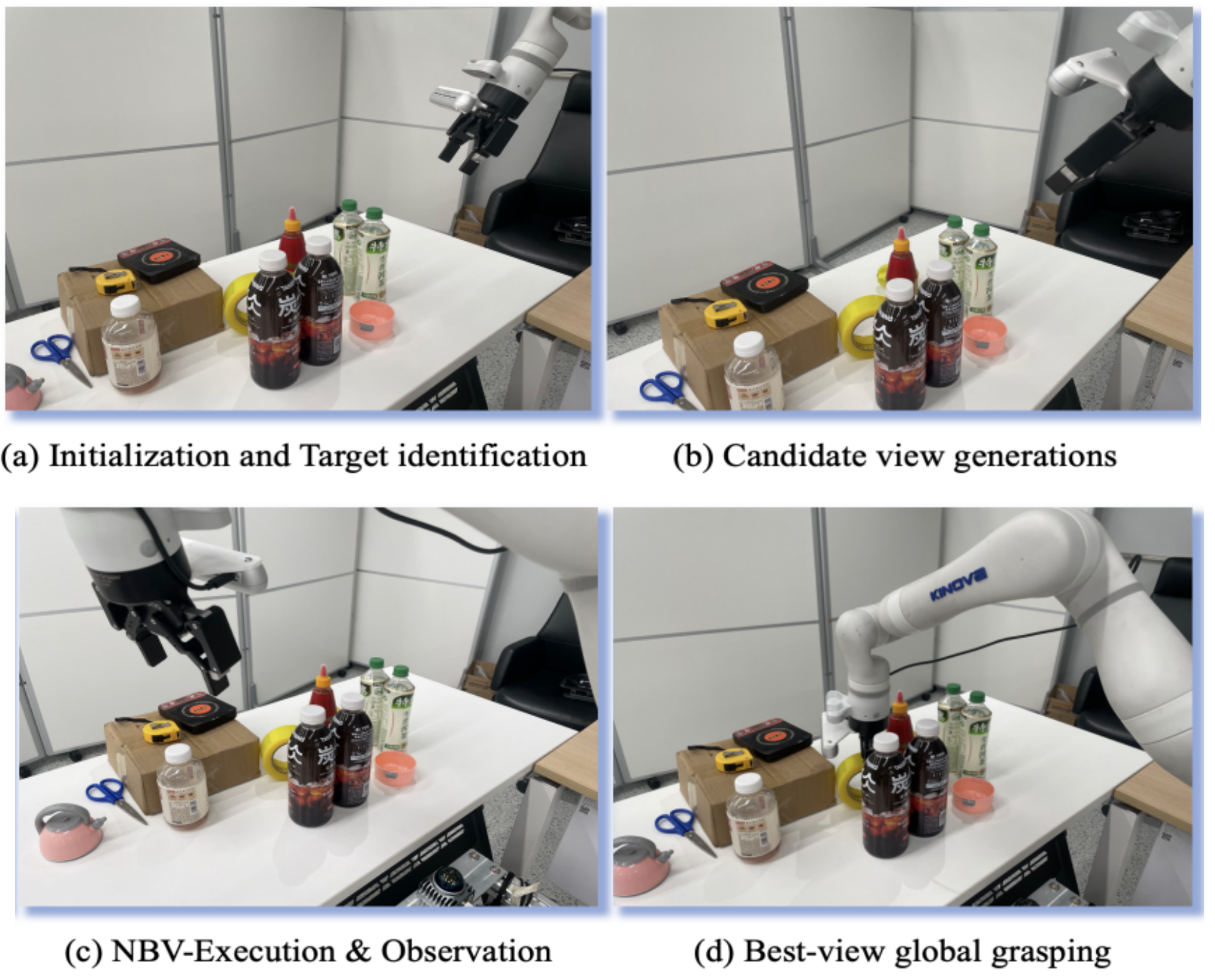
GraspView: Active Perception Scoring and Best-View Optimization for Robotic Grasping in Cluttered Environments
Shenglin Wang, Mingtong Dai, Jingxuan Su, Lingbo Liu*, Chunjie Chen, Xinyu Wu, Liang Lin
[PDF]
-
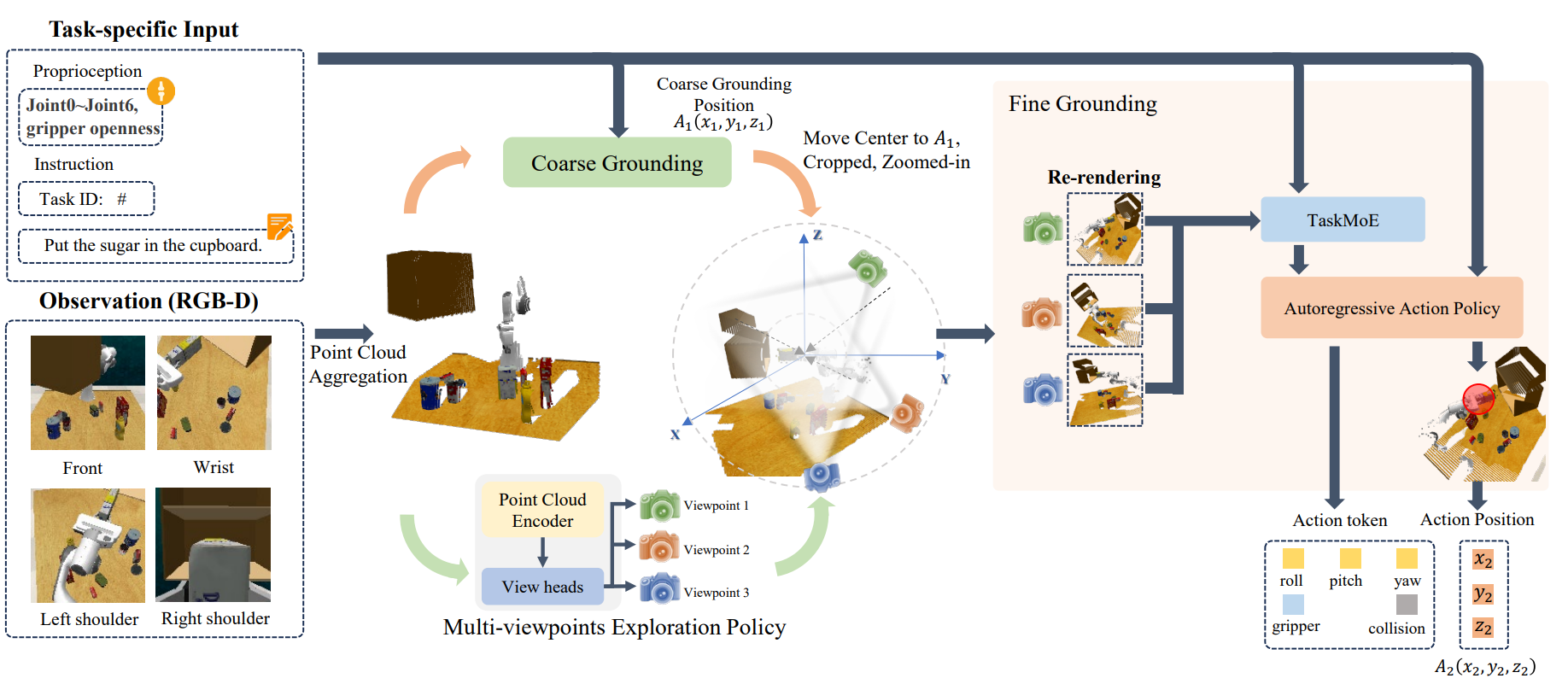
Learning to See and Act: Task-Aware View Planning for Robotic Manipulation
Yongjie Bai, Zhouxia Wang, Yang Liu, Weixing Chen, Ziliang Chen, Mingtong Dai
Yongsen Zheng, Lingbo Liu, Guanbin Li, Liang Lin
IEEE Conference on Computer Vision and Pattern Recognition (CVPR), 2026. [PDF] [Code]
Works